Описание
Первая группа задач
Структурный анализ манипулятора промышленного робота
Определить степень свободы пространственной манипуляционной системы промышленного робота. Вариант схемы механизма, подлежащей анализу, выбирается из рис. 1 по последней цифре шифра студента.
При структурном анализе схемы манипулятора с несколькими степенями свободы указать стойку (неподвижное звено — 0), подвижные звенья, виды кинематических пар, их класс и взаимное расположение. Число степеней свободы манипулятора определяется по формуле для пространственных механизмов.
Вторая группа задач
Кинематический анализ коробки передач
При анализе коробки передач, представляющей собой зубчатый механизм с несколькими степенями свободы, необходимо составить схемы передачи движения от входного вала к выходному для каждой передачи, определить соответствующие передаточные отношения и скорости вращения выходного звена
Задача №01
В четырехскоростной ступенчатой коробке передач определить:
— значения передаточных отношений от колеса 1 к колесу 5 при различных передачах;
— скорости вращения выходного колеса 5.
Включение соответствующей передачи осуществляется одной из муфт (I, II, III, IV).
Заданы числа зубьев колес и скорость вращения ω1 входного колеса 1
Z1 =14 , Z1, =20 , Z2 = 36 , Z3 = 30 , Z4=16, Z5 = 34, Z5,=20 , Z6 = 30, Z7=16, Z8 = 30 , ω1 = 80( рад\с)
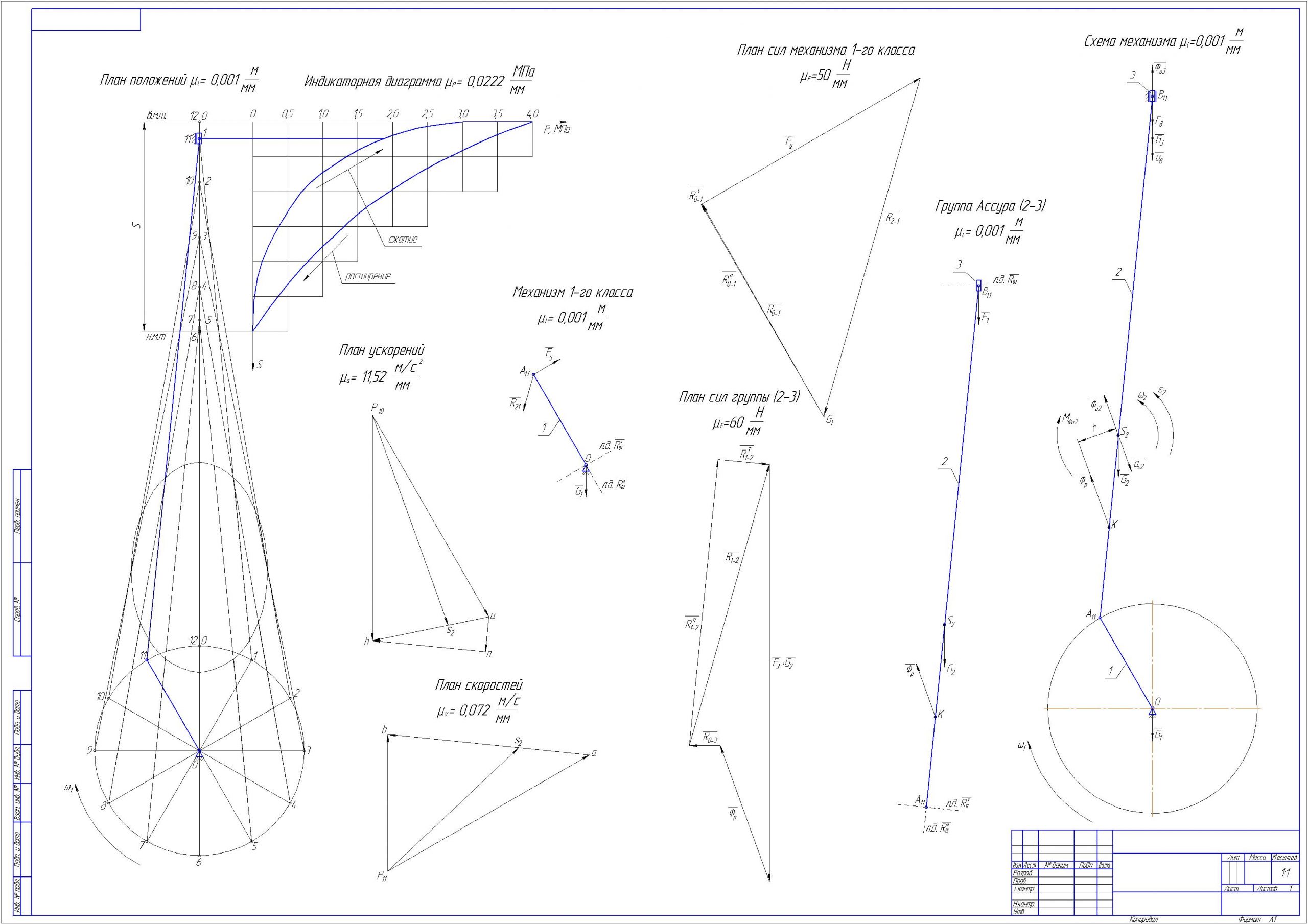
Задача 1. Для положения рычажного механизма, изображенного на рисунке, необходимо:
Методом построения планов скоростей и ускорений определить скорости и ускорения коромысла 02В и ползуна D.
1. Методом кинетостатики определить реакцию RA в шарнире А и приведенный момент на кривошипе Т пр от приложенных усилий F и момента М.