Теоретическая механика методичка Тарга 1978
Задания из методички:
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф. С.М.Тарга, — М.: Высш.школа, 1978.
Представлено 24 товара
-
K1 вариант 22
Описание
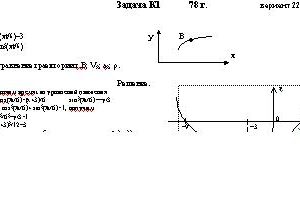
Точка В движется в плоскости ху. Закон движения точки задан уравнениями: х= f1(t), у= f2(t), где х и у выражены в сантиметрах, t — в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 с определить скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Номер рисунка выбирается по предпоследней цифре шифра; а номер условия — по последней.
Дано: уравнения движения точки в плоскости ху: 6*cos(πt/6)-3, y=-3*sin2(πt/6); t=1 с.
Найти: уравнение траектории точки В; скорость VB и ускорение aB, радиус кривизны траектории ρ.Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф. С.М.Тарга, — М.: Высш.школа, 1978. -
K1 вариант 47
Описание
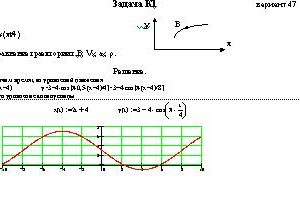
Точка В движется в плоскости ху. Закон движения точки задан уравнениями: х= f1(t), у= f2(t), где х и у выражены в сантиметрах, t — в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 с определить скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Номер рисунка выбирается по предпоследней цифре шифра; а номер условия — по последней.
Дано: уравнения движения точки в плоскости ху: х=2t+4, y=3-4*cos(πt/4); t=1 с.
Найти: уравнение траектории точки В; скорость VB и ускорение aB, радиус кривизны траектории ρ.Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф. С.М.Тарга, — М.: Высш. школа, 1978. -
K1 вариант 66
Описание
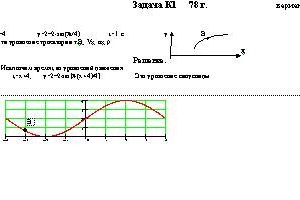
Точка В движется в плоскости ху. Закон движения точки задан уравнениями: х= f1(t), у= f2(t), где х и у выражены в сантиметрах, t — в секундах.
Найти уравнение траектории точки; для момента времени t1 = 1 с определить скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Номер рисунка выбирается по предпоследней цифре шифра; а номер условия — по последней.
Дано: уравнения движения точки в плоскости ху: х=t-4, y=2-2*sin(πt/4); t=1 с.
Найти: уравнение траектории точки В; скорость VB и ускорение aB, радиус кривизны траектории ρ.Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф. С.М.Тарга, — М.: Высш.школа, 1978. -
Д10 вариант 03
Описание
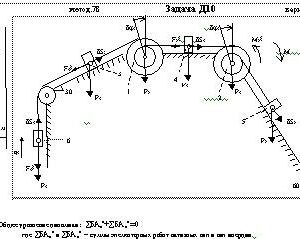
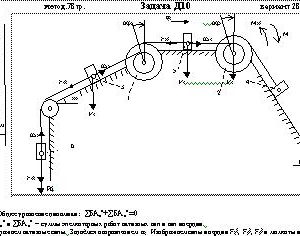
Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3-6, прикрепленных к этим нитям, и невесомого блока. Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом М, приложенной к одному из шкивов. Радиусы ступеней шкива 1 равны: R1 = 0,2 м, r1 = 0,1 м, а шкива 2 — R2=0,3 м, r2 = 0,15 м; их радиусы инерции относительно осей вращения равны соответственно ρ1 = 0,1 м и ρ2 = 0,2 м.
Пренебрегая трением, определить ускорение груза, имеющего больший вес; веса Р1,…,Р6 шкивов и грузов заданы в таблице в ньютонах. Грузы, веса которых равны нулю, на чертеже не изображать (шкивы 1, 2 изображать всегда как части системы).
Дано: R1=0,2 м, r1=0,1 м, R2=0,3 м, r2=0,15 м, ρ1 = 0,1 м, ρ2 = 0,2 м, P1=0 H, P2=20 H, P3=10 H, P4=30 H, P5=0 H, P6=40 H, M=1,8 H*м
Найти а6Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
Д10 вариант 28
Описание
Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3-6, прикрепленных к этим нитям, и невесомого блока. Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом М, приложенной к одному из шкивов. Радиусы ступеней шкива 1 равны: R1 = 0,2 м, r1 = 0,1 м, а шкива 2 — R2=0,3 м, r2 = 0,15 м; их радиусы инерции относительно осей вращения равны соответственно ρ1 = 0,1 м и ρ2 = 0,2 м.
Пренебрегая трением, определить ускорение груза, имеющего больший вес; веса Р1,…,Р6 шкивов и грузов заданы в таблице в ньютонах. Грузы, веса которых равны нулю, на чертеже не изображать (шкивы 1, 2 изображать всегда как части системы).
Дано: R1=0,2 м, r1=0,1 м, R2=0,3 м, r2=0,15 м, ρ1 = 0,1 м, ρ2 = 0,2 м, P1=0 H, P2=40 H, P3=10 H, P4=0 H, P5=30 H, P6=20 H, M=0,9 H*м
Найти а5Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
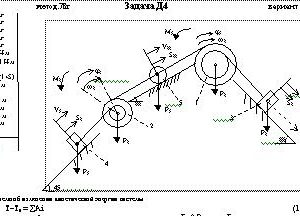
Д4 вариант 03
Описание
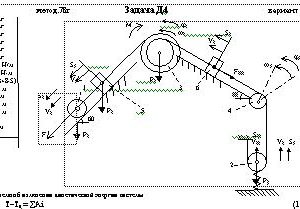
Механическая система состоит из грузов 1,2, 5 и 6, ступенчатого шкива 3, с радиусами ступеней R3=0,3 м, r3=0,1 м, R4=0,2 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 и катка (или подвижного блока) 1; тело 1 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3, 4; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости С.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины ε3 в тот момент времени, когда перемещение s станет равным s1Дано: m1=0 кг, m2=4 кг , m3=6 кг, m4=0 кг, m5=0 кг, m6=2 кг, C=240 Н/м, М=0,3 Н*м, F=40*(3+8*S), S=0,2 м, R3=0,3 м, r3=0,1 м, R4=0,2 м, ρ3=0,2 м, f=0,1
Найти ε3Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
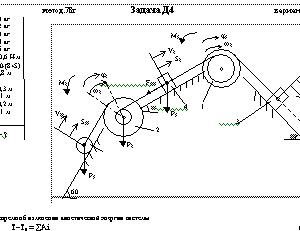
Д4 вариант 28
Описание
Механическая система состоит из грузов 1,2, 5 и 6, ступенчатого шкива 3, с радиусами ступеней R3=0,3 м, r3=0,1 м, R4=0,2 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 и катка (или подвижного блока) 1; тело 1 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3, 4; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости С.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины ω3 в тот момент времени, когда перемещение s станет равным s1Дано: m1=0 кг, m2=6 кг , m3=2 кг, m4=0 кг, m5=4 кг, m6=0 кг, C=200 Н/м, М=1,2 Н*м, F=20*(8+3*S), R3=0,3 м, r3=0,1 м, R4=0,2 м, ρ3=0,2 м, f=0,1
Найти ω3Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
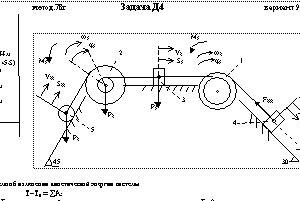
Д4 вариант 47
Описание
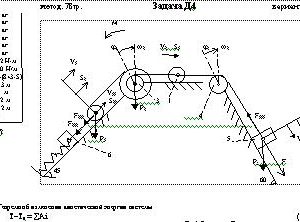
Механическая система состоит из грузов 3 и 4, ступенчатых шкивов 1, 2 с радиусами ступеней R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 радиуса R 2 = 0,2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 1, 2; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 1 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины Vс5 в тот момент времени, когда перемещение s станет равным s1Дано: m1=0 кг, m2=2 кг , m3=0 кг, m4=4 кг, m5=6 кг, М1=0,6 Н*м, F=20*(8+S), S=0,8 м, R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м, f=0,1
Найти Vс5Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
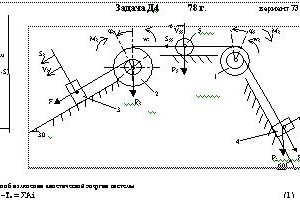
Д4 вариант 67
Описание
Механическая система состоит из грузов 3 и 4, ступенчатых шкивов 1, 2 с радиусами ступеней R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 радиуса R 2 = 0,2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 1, 2; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 1 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины Vc5 в тот момент времени, когда перемещение s станет равным s1Дано: m1=0 кг, m2=2 кг , m3=0 кг, m4=4 кг, m5=6 кг, М1=0,6 Н*м, F=20*(8+S), S=0,8 м, R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м, f=0,1
Найти Vc5Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
Д4 вариант 69
Описание
Механическая система состоит из грузов 3 и 4, ступенчатых шкивов 1, 2 с радиусами ступеней R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 радиуса R 2 = 0,2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 1, 2; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 1 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины V3 в тот момент времени, когда перемещение s станет равным s1Дано: m1=2 кг, m2=0 кг , m3=4 кг, m4=0 кг, m5=6 кг, М1=0 Н*м, М2=0,4 Н*м, F=80*(1+S), S=1,4 м, R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м, f=0,1
Найти V3Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
Д4 вариант 73
Описание
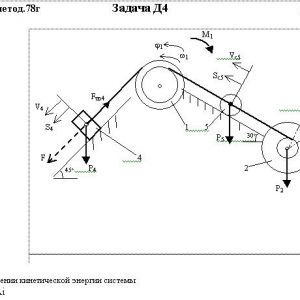
Механическая система состоит из грузов 3 и 4, ступенчатых шкивов 1, 2 с радиусами ступеней R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 радиуса R 2 = 0,2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 1, 2; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 1 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины V4 в тот момент времени, когда перемещение s станет равным s1Дано: m1=0 кг, m2=8 кг , m3=0 кг, m4=2 кг, m5=6 кг, М1=0,3 Н*м, М2=0 Н*м, F=30*(4+5*S), S=0,6 м, R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м, f=0,1
Найти V4Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
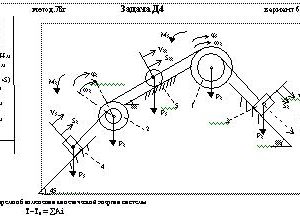
Д4 вариант 76
Описание
Механическая система состоит из грузов 3 и 4, ступенчатых шкивов 1, 2 с радиусами ступеней R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 радиуса R 2 = 0,2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 1, 2; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 1 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины V4 в тот момент времени, когда перемещение s станет равным s1Дано: m1=8 кг, m2=0 кг , m3=0 кг, m4=6 кг, m5=2 кг, М1=0 Н*м, М2=0,8 Н*м, F=50*(2+3*S), S=1 м, R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м, f=0,1
Найти V4Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
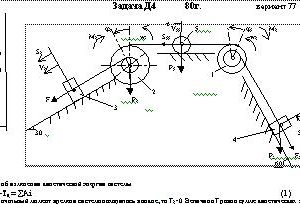
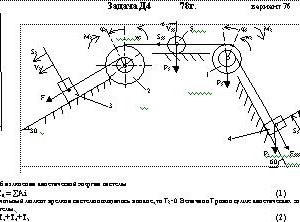
Д4 вариант 77
Описание
Механическая система состоит из грузов 3 и 4, ступенчатых шкивов 1, 2 с радиусами ступеней R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 радиуса R 2 = 0,2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 1, 2; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 1 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины Vc5 в тот момент времени, когда перемещение s станет равным s1Дано: m1=0 кг, m2=2 кг , m3=0 кг, m4=4 кг, m5=6 кг, М1=0,6 Н*м, М2=0 Н*м, F=20*(8+S), S=0,8 м, R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м, f=0,1
Найти Vc5Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
Д4 вариант 87
Описание
Механическая система состоит из грузов 3 и 4, ступенчатых шкивов 1, 2 с радиусами ступеней R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 радиуса R 2 = 0,2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 1, 2; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 1 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины Vc5 в тот момент времени, когда перемещение s станет равным s1Дано: m1=0 кг, m2=2 кг , m3=0 кг, m4=4 кг, m5=6 кг, М1=0,6 Н*м, F=20*(8+S), S=0,8 м, R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м, f=0,1
Найти Vc5Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
Д4 вариант 93
Описание
Механическая система состоит из грузов 3 и 4, ступенчатых шкивов 1, 2 с радиусами ступеней R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м и радиусом инерции относительно оси вращения ρ3 = 0,2 м, блока 2 радиуса R 2 = 0,2 м и катка (или подвижного блока) 5; тело 5 считать сплошным однородным цилиндром, а массу блока 2 равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 1, 2; участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 1 действует постоянный момент М сил сопротивления (от трения в подшипниках).
Определить значение искомой величины V4 в тот момент времени, когда перемещение s станет равным s1Дано: m1=0 кг, m2=8 кг , m3=0 кг, m4=2 кг, m5=6 кг, М1=0,3 Н*м, F=30*(4+5*S), S=0,6 м, R1=0,3 м, r1=0,1 м, R2=0,2 м, r2=0,1 м, f=0,1
Найти V4Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников теплоэнергетических, горных, металлургических, технологических, геологических, электротехнических, химико-технологических, инженерно-экономических специальностей, а также специальностей электроприборостроения и автоматизации, электронной техники и автоматики высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
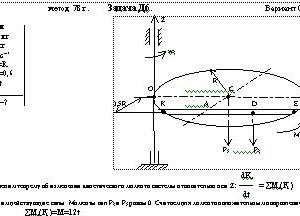
Д6 вариант 03
Описание
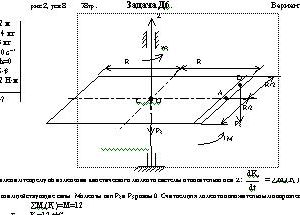
Однородная горизонтальная платформа (круглая радиуса R или прямоугольная со сторонами R и 2R, где R=1,2 м) массой m1 = 24 кг вращается с угловой скоростью ω0=10с-1 вокруг вертикальной оси z, отстоящей от центра масс С платформы на расстоянии ОС = h; размеры для всех прямоугольных платформ показаны на рис. (вид сверху).
В момент времени to = 0 по желобу платформы начинает двигаться (под действием внутренних сил) груз D массой m2 = 8 кг по закону s = AD = F(t), где s выражено в метрах, t — в секундах. Одновременно на платформы начинает действовать пара сил с моментом М (задан в ньютонометрах; при М <0 его направление противоположно показанному на рисунках).
Определить, пренебрегая массой вала, зависимость ω=f(t), т, е. угловую скорость платформы, как функцию времени.
На всех рисунках груз D показан в положении, при котором s >0 (когда s <0, груз находится по другую сторону от точки А). Изображая чертеж решаемой задачи, провести ось z на заданном расстоянии ОС = b от центра С.Дано: R=1,2 м, m1=24 кг, m2=8 кг, ω0=10с-1, OC=h=R, S=AD=0,6, M=12*t
Найти φ=f1(t)Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
Д6 вариант 28
Описание
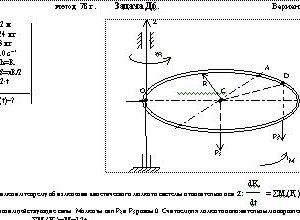
Однородная горизонтальная платформа (круглая радиуса R или прямоугольная со сторонами R и 2R, где R=1,2 м) массой m1 = 24 кг вращается с угловой скоростью ω0=10с-1 вокруг вертикальной оси z, отстоящей от центра масс С платформы на расстоянии ОС = h; размеры для всех прямоугольных платформ показаны на рис. (вид сверху).
В момент времени to = 0 по желобу платформы начинает двигаться (под действием внутренних сил) груз D массой m2 = 8 кг по закону s = AD = F(t), где s выражено в метрах, t — в секундах. Одновременно на платформы начинает действовать пара сил с моментом М (задан в ньютонометрах; при М <0 его направление противоположно показанному на рисунках).
Определить, пренебрегая массой вала, зависимость ω=f(t), т, е. угловую скорость платформы, как функцию времени.
На всех рисунках груз D показан в положении, при котором s >0 (когда s <0, груз находится по другую сторону от точки А). Изображая чертеж решаемой задачи, провести ось z на заданном расстоянии ОС = b от центра С.Дано: R=1,2 м, m1=24 кг, m2=8 кг, ω0=10с-1, OC=h=0, S=0,6t, M=12*t2
Найти ω(t)Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
Д6 вариант 73
Описание
Однородная горизонтальная платформа (круглая радиуса R или прямоугольная со сторонами R и 2R, где R=1,2 м) массой m1 = 24 кг вращается с угловой скоростью ω0=10с-1 вокруг вертикальной оси z, отстоящей от центра масс С платформы на расстоянии ОС = h; размеры для всех прямоугольных платформ показаны на рис. (вид сверху).
В момент времени to = 0 по желобу платформы начинает двигаться (под действием внутренних сил) груз D массой m2 = 8 кг по закону s = AD = F(t), где s выражено в метрах, t — в секундах. Одновременно на платформы начинает действовать пара сил с моментом М (задан в ньютонометрах; при М <0 его направление противоположно показанному на рисунках).
Определить, пренебрегая массой вала, зависимость ω=f(t), т, е. угловую скорость платформы, как функцию времени.
На всех рисунках груз D показан в положении, при котором s >0 (когда s <0, груз находится по другую сторону от точки А). Изображая чертеж решаемой задачи, провести ось z на заданном расстоянии ОС = b от центра С.Дано: R=1,2 м, m1=24 кг, m2=8 кг, ω0=10с-1, OC=h=R, дуга S=πR/2, M=12*t
Найти φ=f1(t)Методичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
К2 вариант 07
Описание
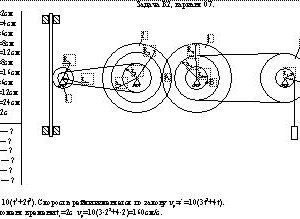
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес. Радиусы ступеней колес равны соответственно: у колеса 1 — г1 = 2 см, R1 = 4 см, у колеса 2 — г2 = 6 см, R2 = 12 см, у колеса 3 — гз = 8 см, R3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ1(t) — закон вращения колеса 1, s4(t) — закон движения рейки 4, ω2(t) — закон изменения угловой скорости колеса 2, v5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5, и V4, v5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v5— скорость груза 5 и т.д.).Дано: S=10*(t3+2t2), t=2 c, R1=4 см, r1=2 см, R2=12 см, a2=8 см, r2=6 см, R3=16 см, r3=8 см, R4=24 см, a4=12 см, r4=6 см
Найти ω2, ε2, vE, WЕ, VB, WВМетодичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
К2 вариант 22
Описание
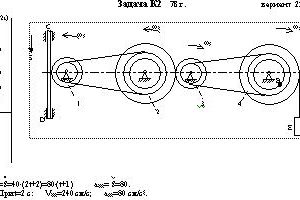
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес. Радиусы ступеней колес равны соответственно: у колеса 1 — г1 = 2 см, R1 = 4 см, у колеса 2 — г2 = 6 см, R2 = 12 см, у колеса 3 — гз = 8 см, R3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ1(t) — закон вращения колеса 1, s4(t) — закон движения рейки 4, ω2(t) — закон изменения угловой скорости колеса 2, v5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s4, s5, и V4, v5 — вниз.
Определить в момент времени t1 = 2 с указанные в таблице в столбцах «Найти» скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v5— скорость груза 5 и т.д.).Дано: S=40*(t2+2t), t=2 c, R1=4 см, r1=2 см, R2=12 см, a2=8 см, r2=6 см, R3=16 см, r3=8 см, R4=24 см, a4=12 см, r4=6 см
Найти ω2, ε2, vE, aЕ, VB, aBМетодичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
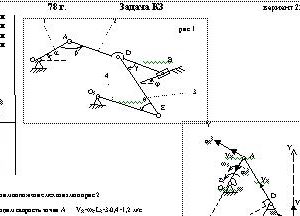
К3 вариант 22
Описание
Плоский механизм состоит из стержней 1, 2, 3, 4 к ползуна В или Е или из стержней 1,2,3 и ползунов В и Е, соединенных друг с другом и с неподвижными опорами О1, О2 шарнирами; точка D находится в середине стержня АВ. Длины стержней равны соответственно 11 = 0,4 м, 12 = 1,2 м, 13 = 1,4 м, 14 = 0,6 м. Положение механизма определяется углами α, β, γ, φ, θ. Значения этих углов и других заданных величин указаны в табл.; при этом ω1 и ω4 — величины постоянные.
Определить величины, указанные в таблицах в столбцах «Найти».
Дано: L1=0,4 м, L2=1,2 м, L3=1,4 м, L4=0,6 м, α=60°, β=60°, γ=60°, φ=90°, θ=120°, ω1=3с-1, ε1=5 с-2
Найти VB, VE, wDE, aB, εABМетодичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
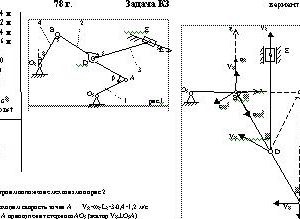
К3 вариант 66
Описание
Плоский механизм состоит из стержней 1, 2, 3, 4 к ползуна В или Е или из стержней 1,2,3 и ползунов В и Е, соединенных друг с другом и с неподвижными опорами О1, О2 шарнирами; точка D находится в середине стержня АВ. Длины стержней равны соответственно 11 = 0,4 м, 12 = 1,2 м, 13 = 1,4 м, 14 = 0,6 м. Положение механизма определяется углами α, β, γ, φ, θ. Значения этих углов и других заданных величин указаны в табл.; при этом ω1 и ω4 — величины постоянные.
Определить величины, указанные в таблицах в столбцах «Найти».
Дано: L1=0,4 м, L2=1,2 м, L3=1,4 м, L4=0,6 м, α=90°, β=150°, γ=120°, φ=90°, θ=30°, ω1=3с-1, ω4=const
Найти VB, VE, wDE, aB, εABМетодичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
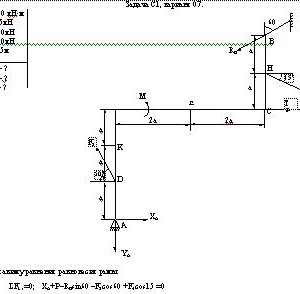
С1 вариант 07
Описание
Жесткая рама, расположенная в вертикальной плоскости, закреплена в точке А шарнирно, а в точке В прикреплена или к невесомому стержню с шарнирами на концах, или к шарнирной опоре на катках.
В точке С к раме привязан трос, перекинутый через блок и несущий на конце груз весом Р = 25 кН. На раму действуют пара сил с моментом М = 60 кН*м и две силы, значения, направления и точки приложения которых указаны в таблице (например, в условиях № 1 на раму действует сила F4 под углом 15° к горизонтальной оси, приложенная в точке D, и сила F 2 под углом 60° к горизонтальной оси, приложенная в точке Е, и т. д.).
Определить реакции связей в точках А, В, вызываемые действующими нагрузками. При окончательных расчетах принять а = 0,5 м.Дано: М = 60 кН*м, Р = 25 кН, F 2=20 кН, F4=40 кН, а = 0,5 м.
Найти ХА, YА, RВМетодичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978. -
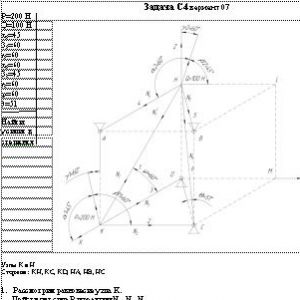
С4 вариант 07
Описание
Шесть невесомых стержней соединены своими концами шарнирно друг с другом в двух узлах и прикреплены другими концами (тоже шарнирно) к неподвижным опорам А, В, С, D. Стержни и узлы (узлы расположены в вёршинах Н, К, L или М прямоугольного параллелепипеда) на рисунках не показаны и должны быть изображены решающим задачу по данным таблицы, В узле, который в каждом столбце таблицы указан первым, приложена сила Р = 200 Н; во втором узле приложена сила Q = 100 Н. Сила Р образует с положительными направлениями координатных осей х, у, z углы, равные соответственно α1 = 45°, β1 = 60°, γ1 = 60°, а сила Q — углы α2 = 60°, β2 = 45°, γ2 = 60°; направления осей х, у, z для всех рисунков показаны на рис.
Грани параллелепипеда, параллельные плоскости ху, — квадраты. Диагонали других боковых граней образуют с плоскостью ху угол φ = 60°, а диагональ параллелепипеда образует с этой плоскостью угол θ = 51°. Определить усилия в стержнях
На рис. в качестве примера показано, как должен выглядеть чертеж, если по условиям задачи узлы находятся в точках L и М, а стержнями являются LM, LA, LB; МА, МС, MD. Там же показаны углы φ и θДано: Р = 200 Н; Q = 100 Н, α1 = 45°, β1 = 60°, γ1 = 60°, α2 = 60°, β2 = 45°, γ2 = 60°, φ = 60°,θ = 51°
Найти усилия в стержняхМетодичка:
1.00 $ В корзину
Теоретическая механика: Методические указания и контрольные задания для студентов-заочников инженерно-строительных, транспортных, машиностроительных и приборостроительных специальностей высших учебных заведений /Под. ред.проф.С.М.Тарга, — М.:Высш.школа, 1978.